Documentation
Rotor Balancing Tools Framework
rtrBalanceTools.framework© for iOS®/iPadOS®
- Version: 1.02
- Author: David Bukowitz
- Created: 12 Apr, 2010
- Update: 09 Jun, 2021
If you have any questions that are beyond the scope of this help file, Please feel free to email via info@rotovibes.com
Description
rtrBalanceTools© framework is an iOS®/iPadOS® library that contains experienced methods to calculate rotor balancing parameters such as the correction weight vector, trim weight vector, residual imbalance, etc.
Methods are designed for the balancing of rigid-rotors in single-plane and two-planes.
Installation
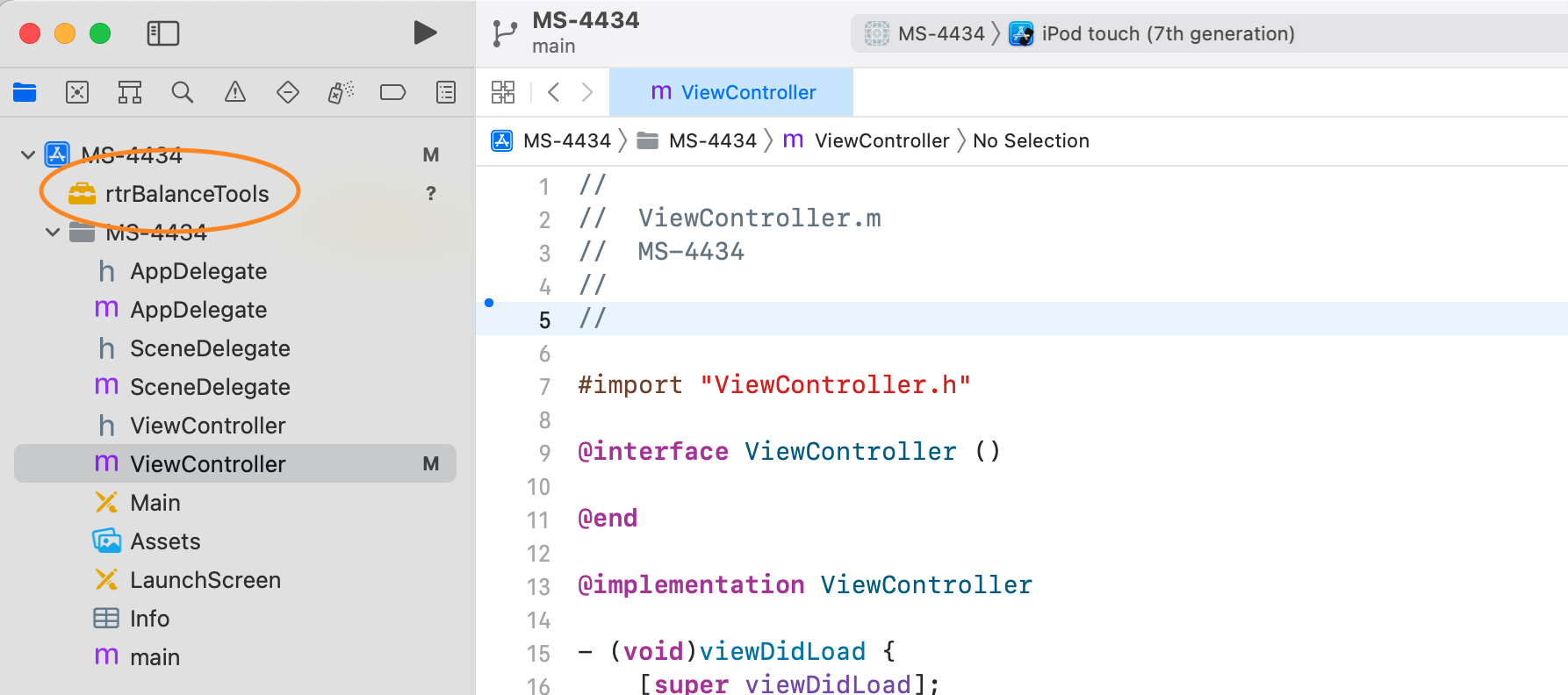
Follow the steps below to install the rtrBalanceTools.framework
- Drag and drop the rtrBalanceTools.framework file into your Xcode project
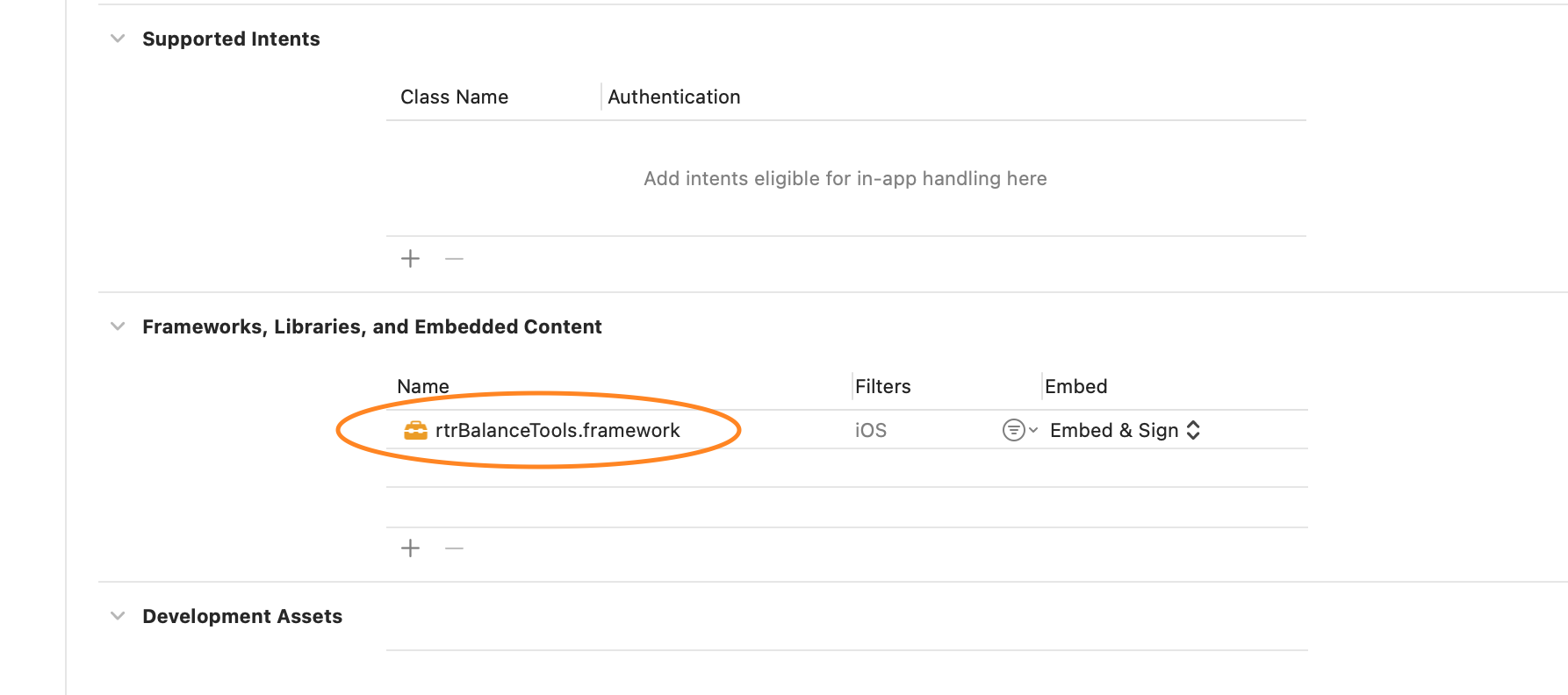
- Select the "Embed & Sign" option in the Framworks, Libraries and Embedded Content menu
Framework Anatomy
- Single-Plane Balancing Correction Weight Calculations
- Single-Plane Balancing Trim Weight Calculations
- Two-Plane Balancing Correction Weight Calculations
- Permissible Residual Imbalance Calculations
- Six Point Residual Imbalance Calculations
// Method to calculate Correction weight magnitude and angle for Single Plane Rotor Balancing
// the magnitude response of the correction weight will be in the same units used for the trial weight (wpMag)
// the angle of the correction weight location will be in degrees
// orMag: Original Imbalance Magnitude (can be any magnitude unit)
// orAng: Original Imbalance Angle (degrees)
// wpMag: Trial weight magnitude (grs, Oz, ...)
// wpAng: Trial weight angle (degrrees)
// opMag: Imbalance with Trial Weight Magnitude (same unit as orMag)
// opAng: Imbalance with Trial Weight Angle (degrees)
// wpRad: Radius for the Trial Weight (inches, mm, cms, ....)
// wcRad: Radius for the Correction Weight (same units as wpRad)
// wpOn: select TRUE if trial weight will be left on the rotor, select FALSE if trial weight will be removed from teh rotor
// resMag:select TRUE to calculate the Correction Weight Magnitude (resAng should be set to FALSE)
// resAng:select TRUE to calculate the Correction Weight Angle (resMag should be set to FALSE)
+ (double)orMag:(double)orMag
orAng:(double)orAng
wpMag:(double)wpMag
wpAng:(double)wpAng
opMag:(double)opMag
opAng:(double)opAng
wpRad:(double)wpRad
wcRad:(double)wcRad
wpOn:(bool)wpOn
resMag:(bool)resMag
resAng:(bool)resAng;
In your project import rtrBalanceTools/singlePlaneWcVector.h and use as follow:
#import "rtrBalanceTools/singlePlaneWcVector.h"
...
correctionWeightMagnitude = [singlePlaneWcVector orMag:omag orAng:oang wpMag:wpmag wpAng:wpang opMag:opmag opAng:opang wpRad:radioWp wcRad:radioWc wpOn:true resMag:true resAng:false];
correctionWeightAnglr = [singlePlaneWcVector orMag:omag orAng:oang wpMag:wpmag wpAng:wpang opMag:opmag opAng:opang wpRad:radioWp wcRad:radioWc wpOn:true resMag:false resAng:true];
// Method to calculate trim adjustment weight magnitude and angle for Single Plane Rotor Balancing
// the magnitude response of the trim weight will be in the same units used for the correction weight (wcMag)
// the angle of the trim weight location will be in degrees
// orMag: Original Imbalance Magnitude (can be any magnitude unit)
// orAng: Original Imbalance Angle (degrees)
// wcMag: Correction weight magnitude (grs, Oz, ...)
// wcAng: Correction weight angle (degrrees)
// fvMag: Vibration after correction weight Magnitude (same unit as orMag)
// fvAng: Vibration after correction weight Angle (degrees)
// resMag:select TRUE to calculate the Trim Weight Magnitude (resAng should be set to FALSE)
// resAng:select TRUE to calculate the Trim Weight Angle (resMag should be set to FALSE)
+ (double)orMag:(double)orMag
orAng:(double)orAng
wcMag:(double)wcMag
wcAng:(double)wcAng
fvMag:(double)fvMag
fvAng:(double)fvAng
resMag:(bool)resMag
resAng:(bool)resAng;
In your project import rtrBalanceTools/singlePlaneTrimVector.h and use as follow:
#import "rtrBalanceTools/singlePlaneTrimVector.h"
...
trimAdjustMagnitude = [singlePlaneTrimVector orMag:omag orAng:oang wcMag:wpmag wcAng:wpang fvMag:opmag fvAng:opang resMag:true resAng:false];
trimAdjustAngle = [singlePlaneTrimVector orMag:omag orAng:oang wcMag:wpmag wcAng:wpang fvMag:opmag fvAng:opang resMag:false resAng:true];
// Method to calculate Correction weight magnitude and angle for Two Plane Rotor Balancing using Influence Coefficients
// the magnitude response of the correction weights will be in the same units used for the trial weights
// the angle of the correction weights location will be in degrees
// Nmod: Original Imbalance Magnitude in the Near Plane (can be any magnitude unit)
// Nang: Original Imbalance Angle in the Near Plane (degrees)
// Fmod: Original Imbalance Magnitude in the Far Plane (can be any magnitude unit)
// Fang: Original Imbalance Angle in the Far Plane (degrees)
// WPNmod: Trial Weight Magnitude used in the Near Plane (grs, Oz, ...)
// WPNang: Trial Weight Angle used in the Near Plane (degrees)
// NNmod: Vibration magnitude in the Near Plane when using trial weight WPN (same units as Nmod and Fmod)
// NNang: Vibration angle in the Near Plane when using trial weight WPN (degrees)
// FNmod: Vibration magnitude in the Far Plane when using trial weight WPN (same units as Nmod and Fmod)
// FNang: Vibration angle in the Far Plane when using trial weight WPN (degrees)
// WPFmod: Trial Weight Magnitude used in the Near Plane (grs, Oz, ...)
// WPFang: Trial Weight Angle used in the Near Plane (degrees)
// NFmod: Vibration magnitude in the Near Plane when using trial weight WPF (same units as Nmod and Fmod)
// NFang: Vibration angle in the Near Plane when using trial weight WPF (degrees)
// FFmod: Vibration magnitude in the Far Plane when using trial weight WPF (same units as Nmod and Fmod)
// FFang: Vibration angle in the Far Plane when using trial weight WPF (degrees)
// WPNrad: radius used for the trial weight in the Near Plane
// WCNrad: radius for the correction weight in the Near Plane
// WPFrad: radius used for the trial weight in the Far Plane
// WCFrad: radius for the correction weight in the Far Plane
// NresMag:select TRUE to calculate the Correction Weight Magnitude for the Near Plane (choose only one TRUE and the other 3 false)
// NresAng:select TRUE to calculate the Correction Weight Angle for the Near Plane (choose only one TRUE and the other 3 false)
// FresMag:select TRUE to calculate the Correction Weight Magnitude for the Far Plane (choose only one TRUE and the other 3 false)
// FresAng:select TRUE to calculate the Correction Weight Angle for the Far Plane (choose only one TRUE and the other 3 false)
+ (double)Nmod:(double)Nmod
Nang:(double)Nang
Fmod:(double)Fmod
Fang:(double)Fang
WPNmod:(double)WPNmod
WPNang:(double)WPNang
NNmod:(double)NNmod
NNang:(double)NNang
FNmod:(double)FNmod
FNang:(double)FNang
WPFmod:(double)WPFmod
WPFang:(double)WPFang
NFmod:(double)NFmod
NFang:(double)NFang
FFmod:(double)FFmod
FFang:(double)FFang
WPNrad:(double)WPNrad
WCNrad:(double)WCNrad
WPFrad:(double)WPFrad
WCFrad:(double)WCFrad
NresMag:(bool)NresMag
NresAng:(bool)NresAng
FresMag:(bool)FresMag
FresAng:(bool)FresAng;
// Method to calculate the Permissible Residual Imbalance from ISO-1940/1
// metricUnits: choose TRUE for Metric units and FALSE for Imperial units
// rotorWeight: weight of rotor (Metric: Kg, Imperial: Lbs)
// rotorSpeed: rotor RPM
// Nplanes: Number of Balancing Planes (1 or 2)
// BQG: Balancing Quality Grade, select from:
// 0: 0.4
// 1: 1.0
// 2: 2.5
// 3: 6.3
// 4: 16
// 5: 40
// 6: 100
// 7: 250
// 8: 630
+ (double)metricUnits:(bool)metricUnits
rotorWeight:(double)rotorWeight
rotorSpeed:(double)rotorSpeed
Nplanes:(int)Nplanes
BQG:(int)BQG;
In your project import rtrBalanceTools/permResidualImbalance.h and use as follow:
#import "rtrBalanceTools/permResidualImbalance.h"
...
double residualImbalance = [permResidualImbalance metricUnits:false rotorWeight:mValue rotorSpeed:wValue Nplanes:(int)npValue BQG:bqcValue];
// Method to calculate Residual Imbalance Magnitude and Angle from 6 Points Measurements
// the algorithm uses the least square method to fit the circle in the specified points
// trialWeight: Trial Weight value (oz, grs, etc)
// twRadius: Trial Weight Radius (inch, mm, etc)
// p1M: Point 1 Magnitude (any units, but consistet with all other points)
// p1A: Point 1 Angle (degrees)
// p2M: Point 2 Mgnitude
// p2A: Point 2 Angle
// p3M: Point 3 Mgnitude
// p3A: Point 3 Angle
// p4M: Point 4 Mgnitude
// p4A: Point 4 Angle
// p5M: Point 5 Mgnitude
// p5A: Point 5 Angle
// p6M: Point 6 Mgnitude
// p6A: Point 6 Angle
// resResImbMag:select TRUE to calculate the Resifual Imbalance Magnitude in unots of the trialWeight/twRadius (choose only one TRUE and the other 4 false)
// resResImbAng:select TRUE to calculate the Resifual Imbalance Angle in degrees
// resCenterX:select TRUE to calculate the X coordinate of the circle center
// resCenterX:select TRUE to calculate the Y coordinate of the circle center
// resRadiusF:select TRUE to calculate the circle Radius
+ (double)trialWeight:(double)trialWeight
twRadius:(double)twRadius
p1M:(double)p1M
p1A:(double)p1A
p2M:(double)p2M
p2A:(double)p2A
p3M:(double)p3M
p3A:(double)p3A
p4M:(double)p4M
p4A:(double)p4A
p5M:(double)p5M
p5A:(double)p5A
p6M:(double)p6M
p6A:(double)p6A
resResImbMag:(bool)resResImbMag
resResImbAng:(bool)resResImbAng
resCenterX:(bool)resCenterX
resCenterY:(bool)resCenterY
resRadiusF:(bool)resRadiusF;
In your project import rtrBalanceTools/sixPointResidualImbalance.h and use as follow:
#import "rtrBalanceTools/sixPointResidualImbalance.h"
...
double PermResImbalance = [sixPointResidualImbalance trialWeight:trialWeight twRadius:trialWeightRadius p1M:p1M p1A:p1A p2M:p2M p2A:p2A p3M:p3M p3A:p3A p4M:p4M p4A:p4A p5M:p5M p5A:p5A p6M:p6M p6A:p6A resResImbMag:true resResImbAng:false resCenterX:false resCenterY:false resRadiusF:false];
int PermResImbalanceAngle = [sixPointResidualImbalance trialWeight:trialWeight twRadius:trialWeightRadius p1M:p1M p1A:p1A p2M:p2M p2A:p2A p3M:p3M p3A:p3A p4M:p4M p4A:p4A p5M:p5M p5A:p5A p6M:p6M p6A:p6A resResImbMag:false resResImbAng:true resCenterX:false resCenterY:false resRadiusF:false];
radiusF = [sixPointResidualImbalance trialWeight:trialWeight twRadius:trialWeightRadius p1M:p1M p1A:p1A p2M:p2M p2A:p2A p3M:p3M p3A:p3A p4M:p4M p4A:p4A p5M:p5M p5A:p5A p6M:p6M p6A:p6A resResImbMag:false resResImbAng:false resCenterX:false resCenterY:false resRadiusF:true];
double centerX = [sixPointResidualImbalance trialWeight:trialWeight twRadius:trialWeightRadius p1M:p1M p1A:p1A p2M:p2M p2A:p2A p3M:p3M p3A:p3A p4M:p4M p4A:p4A p5M:p5M p5A:p5A p6M:p6M p6A:p6A resResImbMag:false resResImbAng:false resCenterX:true resCenterY:false resRadiusF:false];
double centerY = [sixPointResidualImbalance trialWeight:trialWeight twRadius:trialWeightRadius p1M:p1M p1A:p1A p2M:p2M p2A:p2A p3M:p3M p3A:p3A p4M:p4M p4A:p4A p5M:p5M p5A:p5A p6M:p6M p6A:p6A resResImbMag:false resResImbAng:false resCenterX:false resCenterY:true resRadiusF:false];
Changelog
See what's new added, changed, fixed, improved or updated in the latest versions.
Version 1.02 (09 Jun, 2021)
- Updated Optimized for iOS®15
Version 1.01 (19 Sep, 2012)
- Added Six point residual imbalance
- Fixed Bug fixed in single-plane angle calculations
- Updated Optimized for iOS®5
Version 1.0 (12 Apr, 2010)
Initial Release for iOS® based on a previous C++ version